Благодаря наличию встроенных в контроллер Delta ASD-MS всех возможных кинематических схем роботов и различных функций высокоточного управления движением, создание промышленных роботов значительно облегчается
Использование автоматизированных систем управления станками и различным производственным оборудованием несомненно повышает качество выпускаемой продукции и эффективность производства. Следующий шаг на этом пути — использование промышленных роботов. Эти устройства позволяют заменить человека в рутинных или требующих особой точности операциях и еще больше увеличить производительность.
Современные промышленные роботы представляют собой кинематическую систему с требуемым количеством осей и степеней свободы, которыми прецизионно управляет специализированный контроллер. Сфера их применения чрезвычайно широка.
Роботы-манипуляторы используются в упаковочной сфере для автоматической укладки готовой продукции в коробки и ящики, в металлообработке роботы устанавливают заготовки на рабочий стол станка и снимают уже готовую деталь. Есть роботы, используемые для автоматического обмера детали и построения ее чертежа.
Сварочные роботы осуществляют надежную сварку деталей, а окрасочные — покраску автомобильной и бытовой техники. В электронной отрасли роботы применятся для размещения электронных элементов на плате, их пайки и перемещения готовой платы в тестер, обеспечивая стопроцентный выходной контроль. Промышленные роботы находят применение также в деревообработке, пищевой промышленности, складском хозяйстве и других отраслях.
Для создания промышленных роботов требуется определенный набор компетенций, навыков и компонентов. Значительно облегчить этот процесс позволяет использование специализированного контроллера Delta ASD-MS.
На базе ASD-MS возможно создавать роботов и манипуляторов для решения множества задач, возникающих на промышленном предприятии. Для этих целей в контроллер уже заложены математические модели 27 широко востребованных на рынке кинематических схем. Благодаря этому создание робота существенно упрощается и ускоряется.
К примеру, один из наших партнеров — российская компания «АвангардПЛАСТ», производящая промышленных роботов под торговой маркой Grinik Robotics, представила на прошедшей в мае 2022 года выставке «Металлообработка-2022» дельта-робота на базе контроллера серии ASDA-MS. Демонстрация работы робота производилась на стенде нашей компании.

В процессе демонстрации дельта-робот Grinik Robotics прецизионно выполнял движения по программе в G-кодах. Благодаря поддержке контроллером ASD-MS G-кодов, роботы его основе могут выступать в качестве обрабатывающих устройств в металлообработке или измерительных систем для создания образа объекта.
Контроллер Delta ASD-MS предназначен для управления сервоприводами роботов различных типов и уже содержит все возможные кинематические схемы роботов и манипуляторов — 27 схем. Выбор типа робота и его настройка осуществляется в бесплатном ПО DRAS, которое идет в комплекте с контроллером.
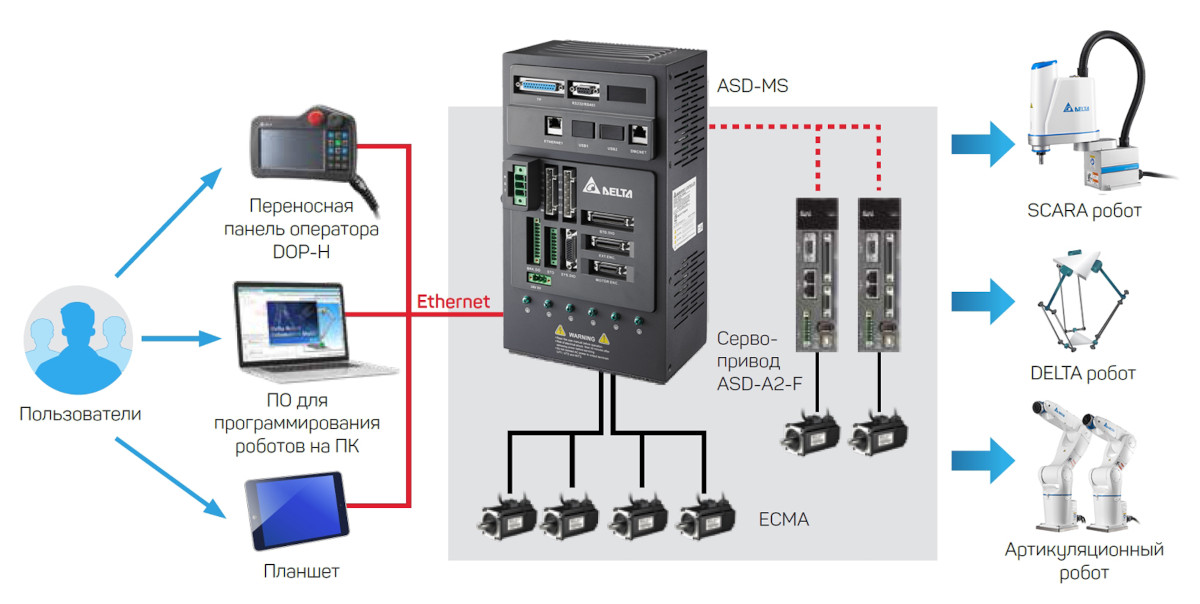
Благодаря поддержке ASD-MS любой кинематической схемы робота — SCARA, шарнирный робот, дельта-робот с линейными или поворотными приводами и др., можно создавать манипуляторы для решения практически любой задачи. Контроллер имеет 4 встроенных сервоусилителя для управления двигателями, кроме того возможно подключение до 6 внешних сервоприводов Delta серии ASD-A2 мощностью до 15 кВт. В сумме это дает возможность создавать манипуляторы с количеством осей до 10. Кроме того, ASD-MS имеет встроенную функцию синхронизации с конвейером (conveyer tracing).
ASD-MS имеет в своем арсенале также функцию обучения роботов. Данная функция позволяет в процессе управления роботом одновременно сохранять различные координаты, включая геодезические, пользовательские и рабочие. Затем эти координаты можно использовать для высокоточного позиционирования робота.
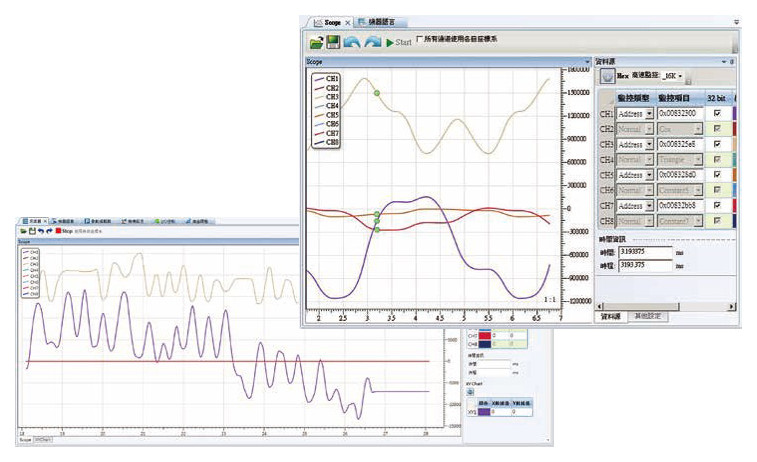
Встроенный в ASD-MS осциллограф позволяет осуществлять мониторинг и анализ в реальном времени различной информации, такой как состояние процесса движения манипулятора робота, операции планирования пути. Кроме того, осциллограф позволяет отображать состояние системы и параметров двигателей, таких как положение, скорость и ток каждой оси во время движения. Анализируя эту информацию, можно оперативно оптимизировать настройки сервоприводов, повышая эффективность, точность и надежность робота.
Поставляемое в комплекте с ASD-MS бесплатное ПО Delta Robot Automation Studio (DRAS) поддерживает пять видов языков программирования МЭК 61131-3, стандартные функциональные блоки управления движением PLCopen, G-коды, используемые в системах ЧПУ и языки DRL. DRAS является комплексной средой разработки, которая позволяет создавать собственные прикладные программы роботов для решения специфических задач.
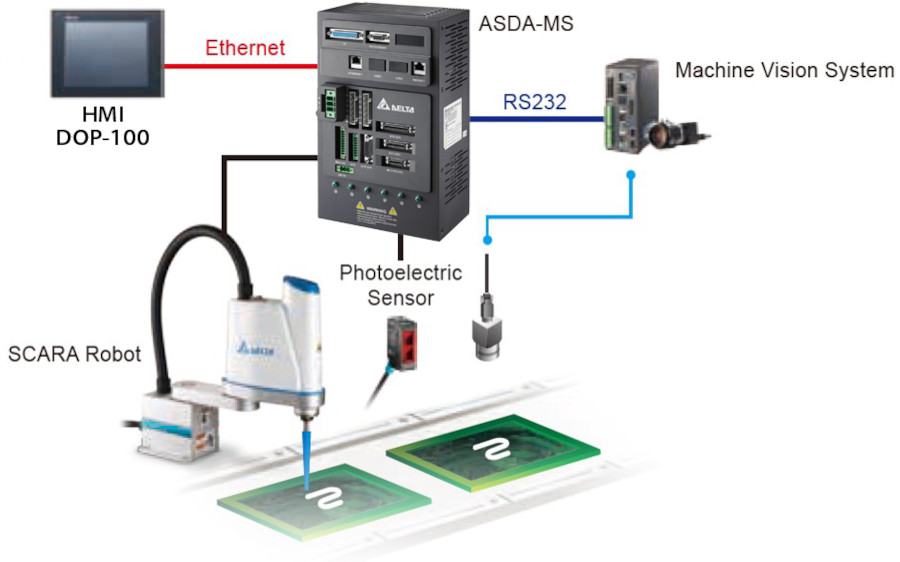
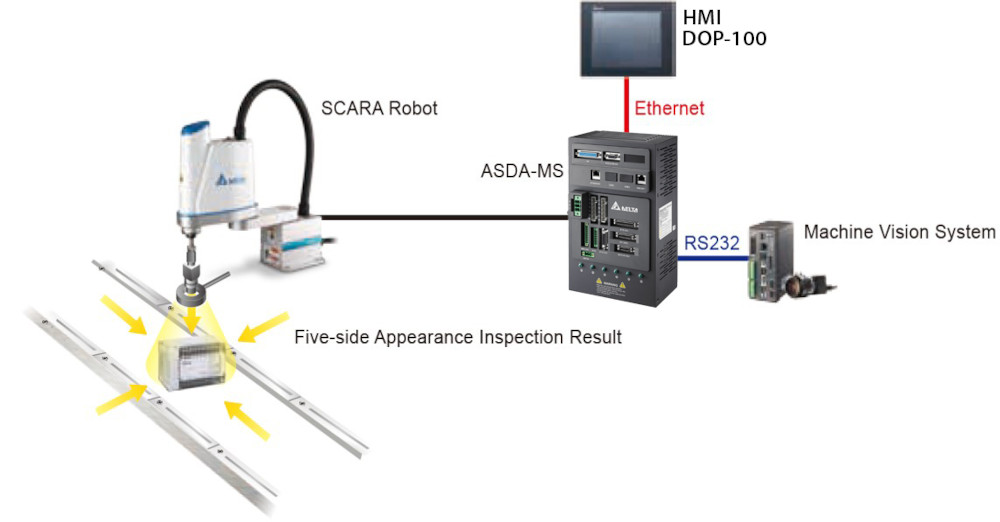
Для быстрой интеграции с периферийными устройствами, такими как ПЛК, системы машинного зрения и конвейерные линии ASD-MS имеет различные протоколы связи, включая Ethernet и RS-485/232.
ASD-MS содержит множество инструментов для реализации пользовательских функций, включая динамическую компенсацию нелинейных величин, влияющих на движения робота. Это позволяет создавать высокоскоростные манипуляторы, осуществляющие движение с высокой точностью.
Программное обеспечение контроллера с помощью простых операций в интуитивно понятном интерфейсе позволяет в реальном времени регулировать различные параметры манипулятора, включая передаточное число, предельное значение и отклонение руки робота. В наличии также функция интеллектуальной калибровки робота, которая позволяет автоматически корректировать параметры устройств в соответствии с их фактическим размером.

Встроенные команды движения робота (например, точка-точка, линейное и дугообразное), а также поддержка стандартных G-кодов для ЧПУ и другие функции, такие как фиксированная скорость подачи и снижение погрешности прохождения пути, делают ASDA-MS идеальным решением для управления движением.
Сфера применения роботов и роботизированных систем на базе ASDA-MS — весьма обширна, они находят применение в самых различных производственных процессах. Основная цель применения данных роботов — замена или оптимизация человеческого труда в сферах и задачах, где его использование нерентабельно, опасно либо является источником ошибок.
Ниже представлены несколько промышленных задач, которые эффективно решают роботы, созданные на основе контроллера Delta ASD-MS.