Характеристики контроллеров движения на базе ПК (PAC) MH1/ MH2 Delta Electronics
Основные характеристики:
Энергоэффективность и надежные компоненты
- Модели MH1/MH2: конструкция без кабелей, вентилятора, низкое потребление энергии повышают стабильность работы, встроенные порты для карт памяти CF и SD и слот для подключения SSD диска обеспечивают быструю и надежную передачу данных
- Модель МР1 имеет панель оператора 10.1” для более удобной работы
Различные коммуникационные интерфейсы
USB порты, последовательные СОМ порты, гигабитные Ethernet порты, а также PCI/PCIe слоты расширения
Поддержка Master и Slave модулей
Встроенные DMCNET и EtherCAD протоколы для подключения модулей расширения и сервоприводов. Доступны платы расширения DMCNET/ EtherCAD
Высокая безопасность
Настраиваемый IC инструмент для решения вопросов безопасности и конфиденциальной защиты
Поддержка операционной системы и ПО
MH1/MH2 поддерживают ОС реального времени (RTE, VxWorks), а также Windows OS 7/10. Возможно использование для программирования встроенных DLL-библиотек и среды разработки SoftHMI и SoftPLC
Отслеживание кривой скорости
Функция отслеживания кривой скорости для слежения за скоростью текущего движения и корректировки команд
Режим симуляции перемещений
На основании значений данных команд или реальных перемещений графически представляет кривую прогнозируемого или реального перемещения в плоскости XY
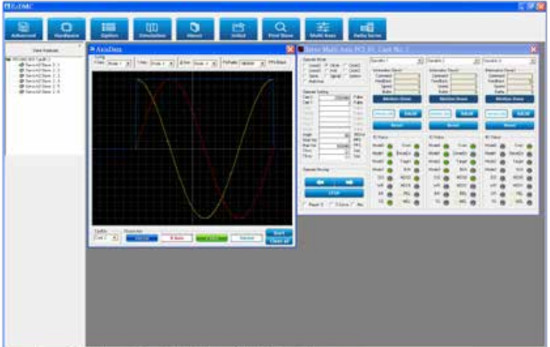
Программное обеспечение DMCNET/EtherCAT Automation Software
ПО EzDMC/EcNavi позволяют конфигурировать DMCNET/EtherCAT устройства для обмена данными, функциональной идентификации, а также программировать и отлаживать, предлагая, таким образом, простой и быстрый способ освоения контроллера для начинающих
Платформа контроля движения, базирующаяся на CodeSYS
Базирующийся на ПК контроллер движения AX864E позволяет использовать CodeSYS, сокращая время и стоимость решения проектных задач
Функции контроля движения
управление позиционированием «От точки к точке»,
многоосевая линейная интерполяция,
одноосевое 2-скоростное перемещение,
дуговая интерполяция,
винтовая интерполяция,
компенсация люфта,
компенсация отклонения при движении по винтовой траектории,
Чтобы сделать наш сайт удобнее для вас, мы используем файлы cookies. Продолжая работу с сайтом, вы соглашаетесь с условиями использования cookies и соглашаетесь с политикой конфидинциальности.