Краткое описание проекта:
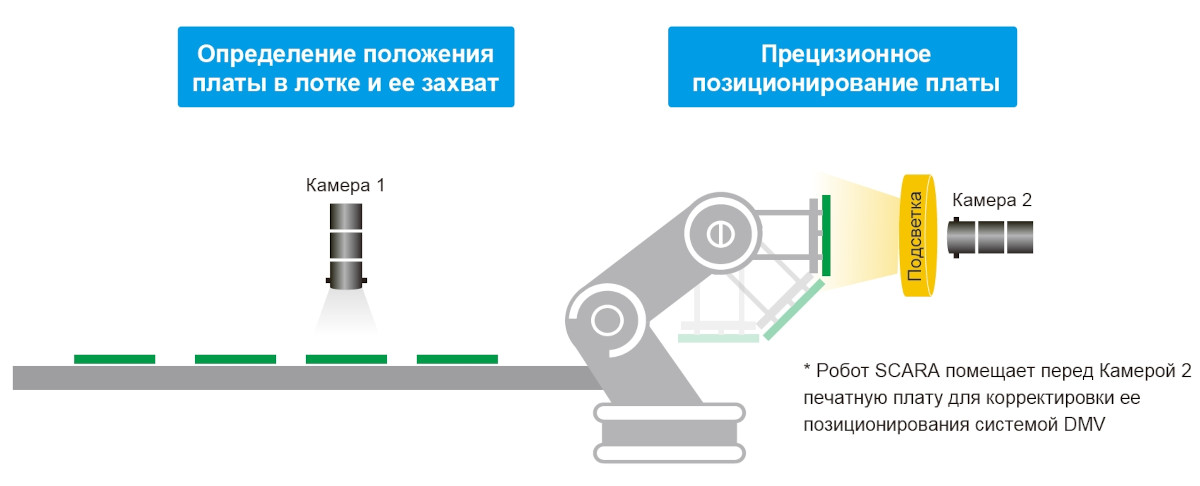
Для автоматизации процесса тестирования печатных плат используется система машинного зрения на базе контроллера Delta DMV2000 в комплекте с двумя камерами, имеющими разное поле зрения: большое у Камеры 1 и малое — у Камеры 2. Система обеспечивает прецизионное позиционирование платы для корректной ее установки в тестер.

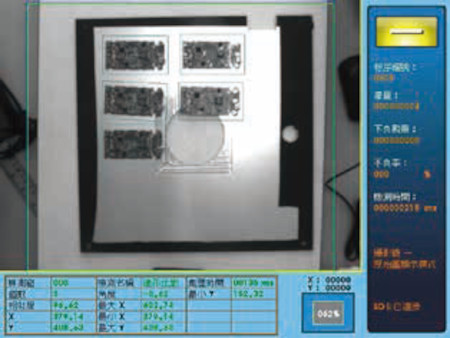
Камера 1, откалиброванная по 11 точкам, применяется для идентификации печатных плат в лотке. Используя функцию «Shape», система DMV2000 вычисляет положение всех плат и поочередно передает SCARA-роботу координаты каждой из них для корректного захвата.
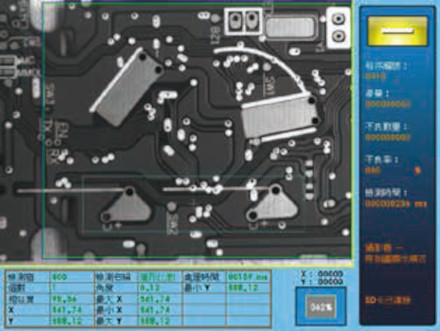
Камера 2 применяется для прецизионного позиционирования платы роботом. Система DMV2000, используя две функции «Shape» для анализа схемы разводки платы, вычисляет координаты X, Y и угол поворота конкретного экземпляра. Затем система рассчитывает величину отклонений этих параметров от эталонных и передает их SCARA-роботу для корректировки позиционирования платы.
Процесс работы:
Камера 1 определяет положение платы и передает ее координаты SCARA-роботу для захвата. После захвата платы SCARA-робот помещает ее в поле зрения Камеры 2, которая используется для корректировки ее позиционирования роботов. Затем SCARA-робот устанавливает плату в электрический тестер.
Конфигурация системы:
| Контроллер | |||
| Камера 1 | DMV-CM30GCL, ч/б 0,3 Мп | Камера 2 | DMV-CM2MGCL, ч/б 2 Мп |
| Объектив | с фокусным расстоянием 12 мм | Объектив | с фокусным расстоянием 12 мм |
| Подсветка | Контурная (Backlight) | Подсветка | Белое светодиодное кольцо |
| Расстояние до объекта | 760 мм | Расстояние до объекта | 90 мм |
| Поле зрения | 300 x 225 мм | Поле зрения | 40 x 30 мм |